ロボット制御プラットフォーム
人手不足や働き方改革を背景に、物流業界を中心にロボット導入の需要が高まっています。
パナソニック コネクトでは、ロボットハンドやAI技術などロボット関連機器を一元制御するプラットフォームを開発。現場作業者が専門業者を介さずにロボットの設定を行えるユーザーインターフェースを備え、システム開発者の負担を大幅に軽減します。
これにより、物流業界の人材不足や変動する物流量に柔軟に対応し、企業のコスト削減と業務効率化を支援します。
ロボット制御プラットフォーム
ロボット制御プラットフォームは、パナソニック コネクトが持つ「ロボット制御技術」を中心に、市販のロボットアーム、センサーやカメラなど物流倉庫でピッキングタスクを行う際に必要な多様なハードウェアやコア技術を一元制御できるオープンなプラットフォーム(PF)です。
特長
- タスク構築用ユーザーアプリケーション
ロボット制御PFのフレームワークを用いて、個々の自動化タスクに合わせたアプリケーションを組むことができます。 - ハードウェアの抽象化
これまでは、ロボットハンド・ロボットアームや関連機器の組合せごとに、開発が必要でしたが、ロボット制御PFではそれぞれのハードウェアのインターフェースを抽象化し、ライブラリとして用意します。そのため、システム構築、置き換えが容易に行えます。 - コア技術のフレームワーク化
画像認識やセンシング、ロボットアームの経路生成などのコア技術をライブラリとして提供します。 - ソフトウェアの更新
クラウドから新しいバージョンを提供し、常に最新のソフトウェアをお使いいただけます。
また、PFで動作している動作ログはクラウド上に集約。データを利活用し、業務効率化を図ることができます。
ロボット制御プラットフォーム
ハードウェアの抽象化
提供価値
ロボット制御PFの導入は、現場担当者だけではなく幅広い部門、担当者に大きな価値をもたらします。
また、関連企業の業務効率、営業面でも貢献します。
工程自動化支援
自動化に向けて必要な動作シナリオの作成、作業情報に基づいた試算による投資評価の支援を行うことができます。
動作シナリオの作成
まずは、作業を最小単位に分解し、処理手順、コスト、生産性、機材スペックを抽出。作業要素を分析し、機器のシステム構成と導入時のロボット動作シナリオを作成できます。
工程全体での最適化
自動化対象工程の前後工程、商品供給形態も考慮し、自動化に伴う工程全体でのコストの増加を抑制します。
自動化による経営効果
自動化による経営効果は、人件費の抑制だけでなく、品質向上、社員の負担軽減、安全確保、属人化の解消など多岐にわたります。QCDESの指標で効果を分析し、経営的にメリットを検討することが重要です。
また生産性を高めることで安全性が損なわれるなど偏った経営効果にならないように安全性、生産性のバランスをとった投資判断が必要です。
コア技術
パナソニック コネクトの研究開発部門は、ロボティクスに関するさまざまなコア技術を保有しており、目的に応じて、計画x認識x制御の擦り合わせ技術でプリミティブ動作を生成するなど、お客様の現場に役立つ研究を行っています。
2次元物体認識
撮影した画像から対象物を認識し、矩形として抽出
3次元姿勢推定
撮影した画像から対象物を直方体で数値化し、3次元の数値を推定
把持戦略
対象物の3次元情報および周辺環境情報から安定した把持計画を求める技術
吸着位置姿勢推定
画像から対象物の吸着可能な面を検出し、安定吸着できる位置と姿勢を推定
二指把持位置姿勢推定
画像から対象物を安定把持できる位置および姿勢を推定
未知物体把持
事前情報がない対象物に対して、画像から安定した把持経路を求める技術
配置位置姿勢認識
画像から配置先の空き領域の状況を認識して適切な位置、姿勢(向き)で配置
配置制御
画像から配置先の空き領域の状況を認識して配置の中断、再開、変更を制御
インハンドマニピュレーション
ロボットハンドが対象物を把持したまま、位置や姿勢を変更することができる技術
ロボット導入に向けてのPoC開発
「業務効率向上のためにロボットの導入を検討しているが、期待した効果が得られるか不安がある、本格的にシステムを導入してからの失敗は避けたい」
そのようなお悩みをお持ちではないでしょうか?
パナソニック コネクトの研究開発部門では、お客様の多様な課題に対応するために、ロボット制御PFを使ったPoC(概念実証)による研究開発を実施しています。汎用パソコンを活用し、ロボット1台からスタートできるなど、スモールスタートからはじめて実際の使用環境に即した仮説検証を行い、短期間で技術の実用性を評価することができます。
ロボット導入ソリューション実証実験動画
多様な現場での導入を想定して、さまざまな動作検証を繰り返し、製造、物流、流通などの現場で役立つソリューション研究開発を進めています。
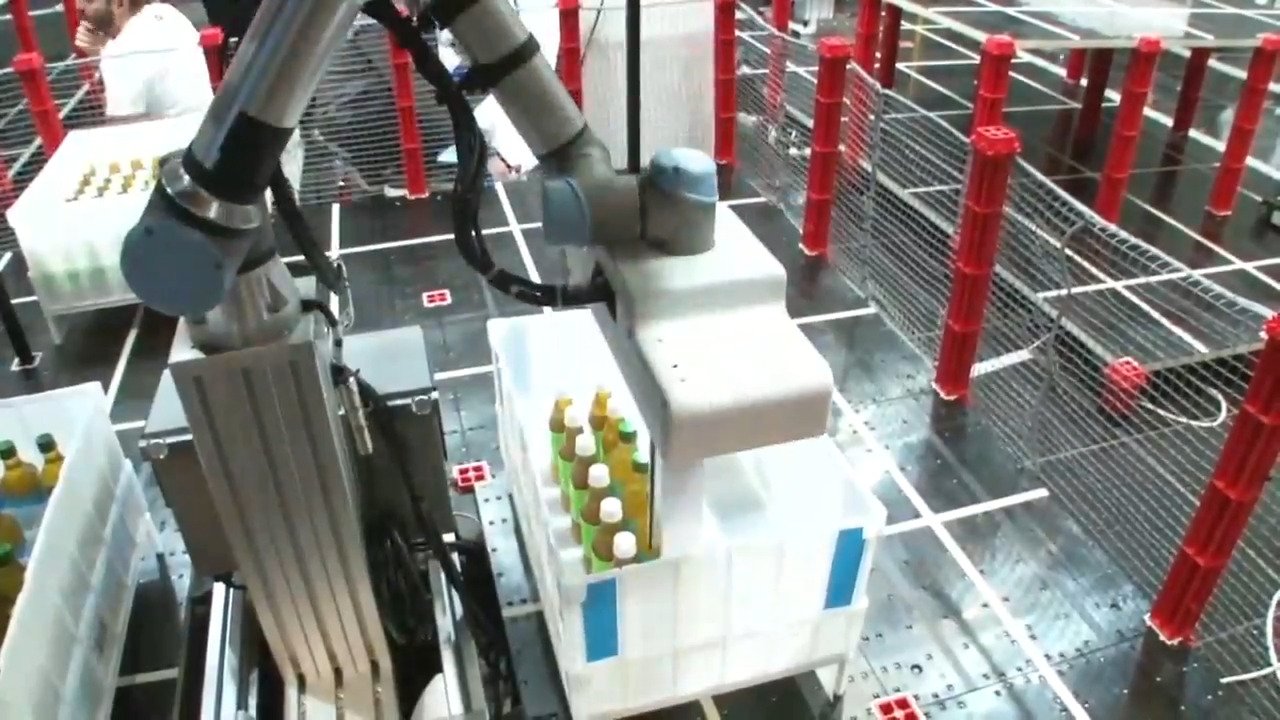
〈製造現場〉
梱包作業の自動化
梱包自動化工程を低コストで自動化。高価な協働ロボットでの実用検討を行った後、ロボットを低価格化、複数台用いることで、コスト、タクトの両面で費用対効果を最大化。
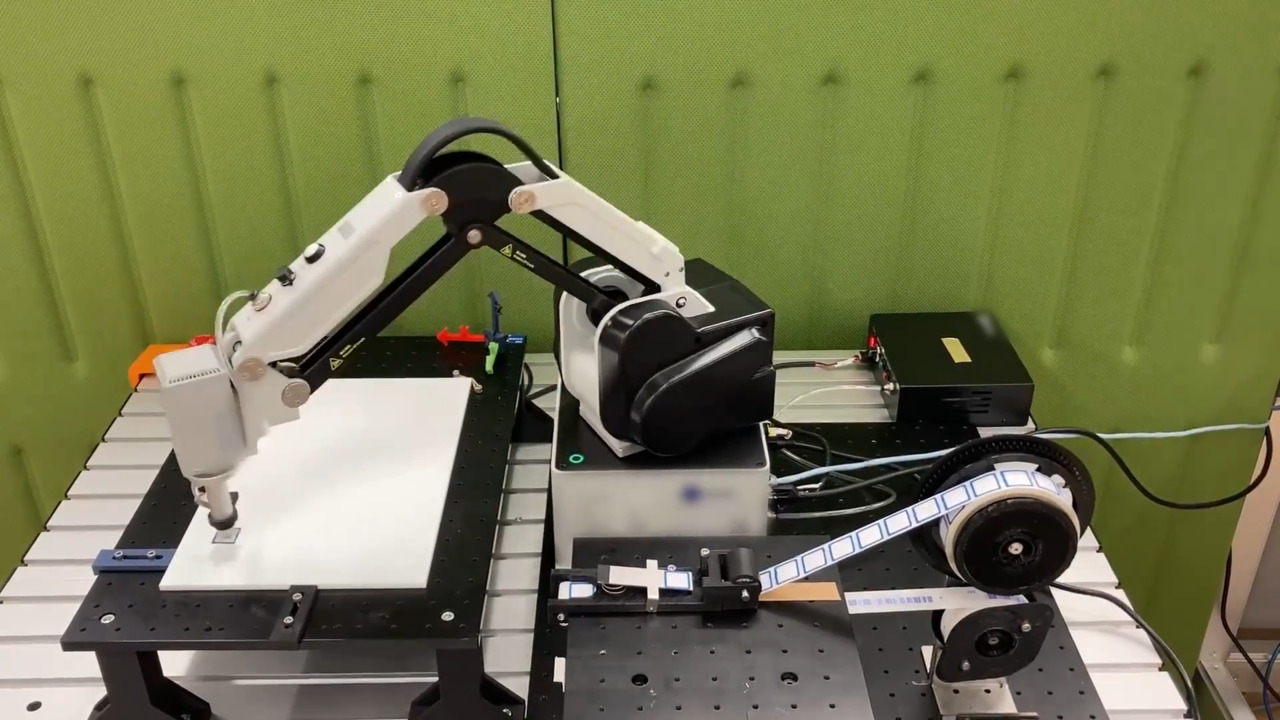
〈製造現場〉
シール貼り工程の自動化
製造工程でのシール貼り工程を比較的低価格なロボットにさせることで、人同等のコストで自動化を実現。工場における製造原価削減に貢献します。
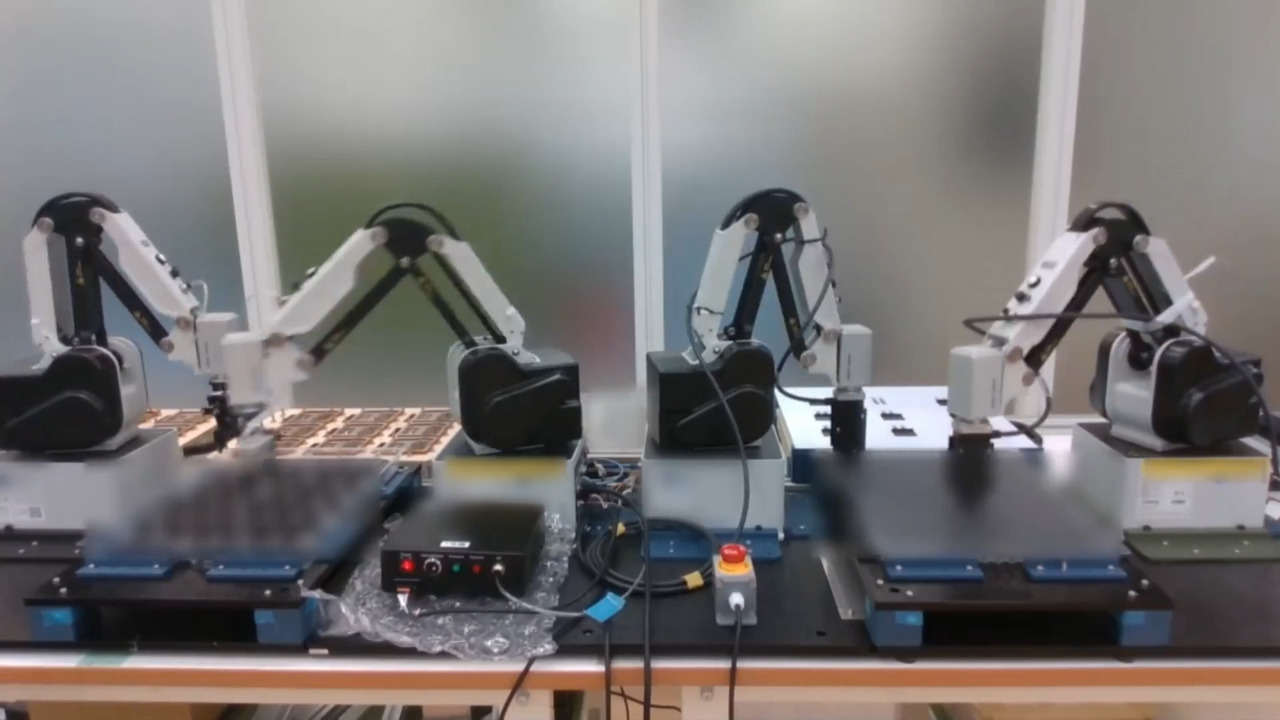
〈物流現場〉
ピッキング作業
自動倉庫での仕分け作業を、商品外観や包装特性を考慮し、ロボットによる仕分けが適切か、人による仕分けが適切かを自動的に最適化。仕分け作業の効率化を図ります。